声学相机的工作原理是什么?
的有关信息介绍如下:声学相机也可以称之为声像仪(声相仪),是利用声传感器阵列测量一定范围内的声场分布的专用设备。
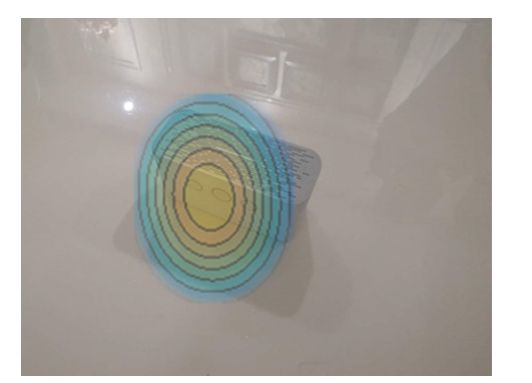
可用于测量物体发出的声音的位置和声音辐射的状态,将采集的声音以彩色等高线图谱的方式可视化呈现在屏幕上,有效的测量声场分布,声场图与可见光的视频图像完美叠加,形成类似于热影像仪对物体温度的探测。
只说概念可能还是挺抽象,估计大部分人看完仍似懂非懂

我们先划关键字:
1.声传感器阵列
2.彩色等高线图谱
3.声场图与可见光的视频图像完美叠加
围绕声学相机的成像原理,我们来逐个介绍。
声传感器阵列其实就是我们之前文章所介绍的声呐阵列,具体不同声传感器个数与不同阵型会如何影响声呐系统,可以参考——空气声呐的阵元个数与大小到底影响什么?
声呐阵列不同阵形的性能有什么区别?
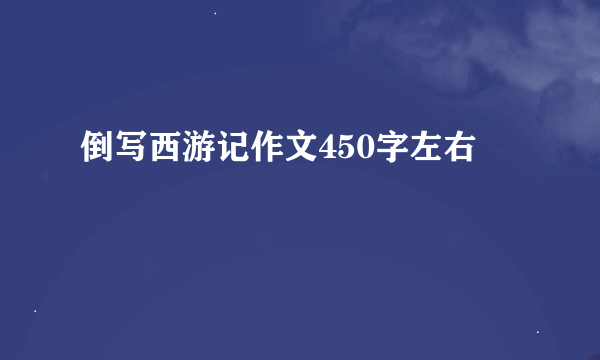
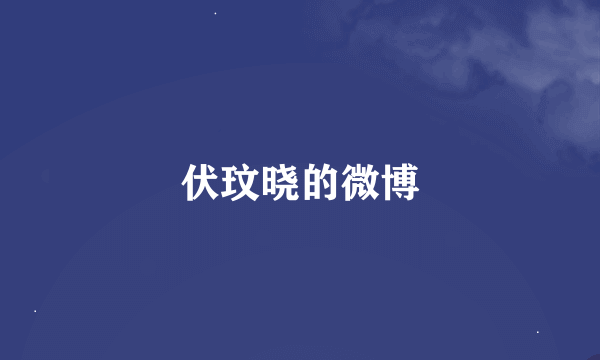
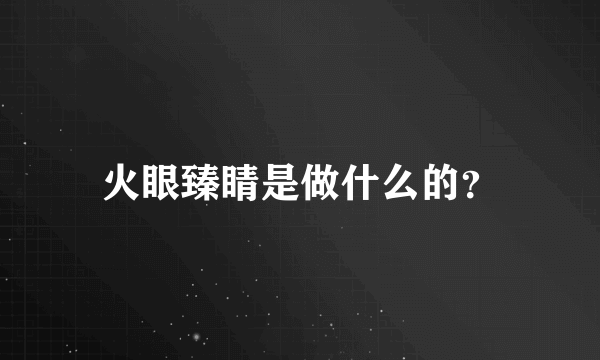
这里我们主要讲讲目前国内外主流的阵型——螺旋阵。下图是几款声学相机的外观图片,我们暂且以A/B/C命名:
看完会发现这些声学相机中间都有一个小型摄像机模组,但也有小伙伴可能会有疑问,A设备阵型明显是螺旋阵,B、C看起来不像啊?是什么阵型呢?
其实都是螺旋阵,只是采用了不同的设计参数产生的而已,看看下图想必各位就一目了然了,下图分别展示了A/B/C阵列的设计方式。
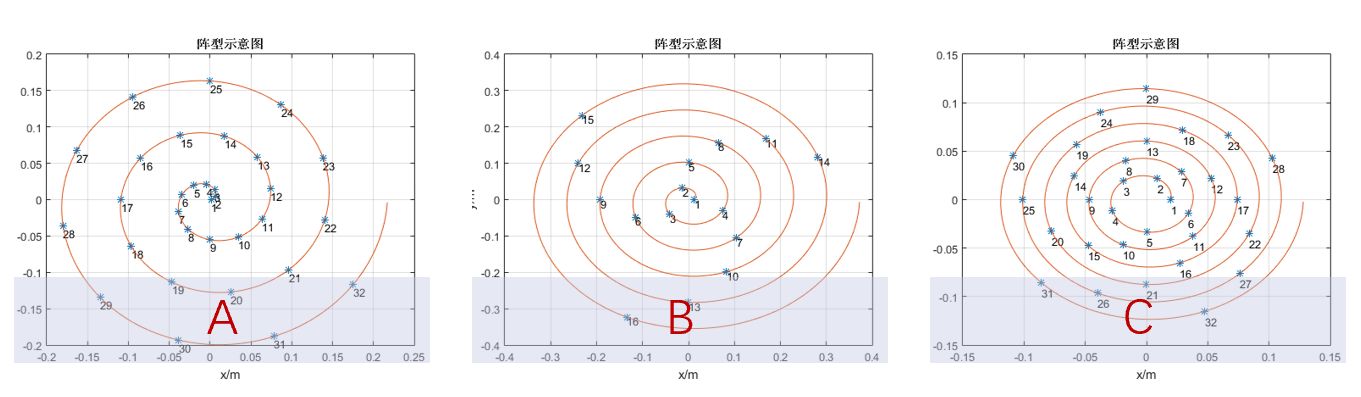
图中蓝色的点是阵元的位置,可以看出三款声学相机虽然外观差异很大,但从阵型设计角度来看,仍然是完全遵循螺旋阵的设计规范的,只是所选的参数不同而已。
由此我们可以看出,以螺旋阵为代表的非均匀阵列,确实是目前绝大多数声学相机厂家所选择的设计规范,这也决定了声学相机的外观。
彩色等高图谱
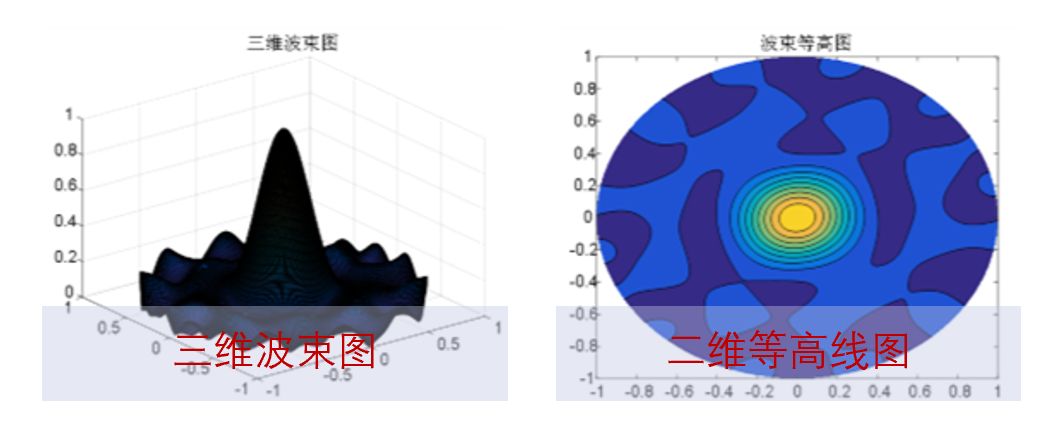
这个词听起来一定很耳熟吧,等高图谱?没错,就是我们前几篇所介绍的阵列采用波束形成技术计算的波束图投影到二维平面上所形成的等高线图。
声场图与可见光的视频图像的完美叠加
彩色等高图谱是介绍出来了,可怎么和可见光的视频图像叠加呢?其实就是坐标系之间的转换,把等高图谱的每一个方位点与照片像素一一对应,并采用透明的画法绘制上去就可以了。这里我们详细拆分介绍下(具体的原理细节我们不做阐释),还是来点直观的图。
我们一般摄像机模组的成像区域是下图所示:
图中的可视区域是矩形的,因为一般的镜头都采用矩形的光敏元器件(所以我们平常看的相机画面,包括手机/摄像机的画面,都是矩形的)。
而一般的声呐阵列的成像区域则如下图所示:
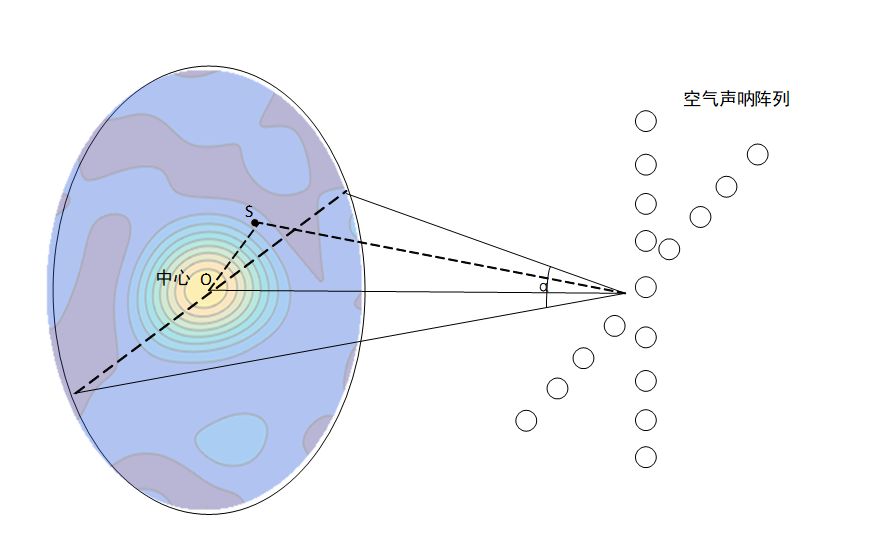
当我们把摄像机模组安装在声呐阵列的中心时,两者保持了同轴同中心,则如下图所示:
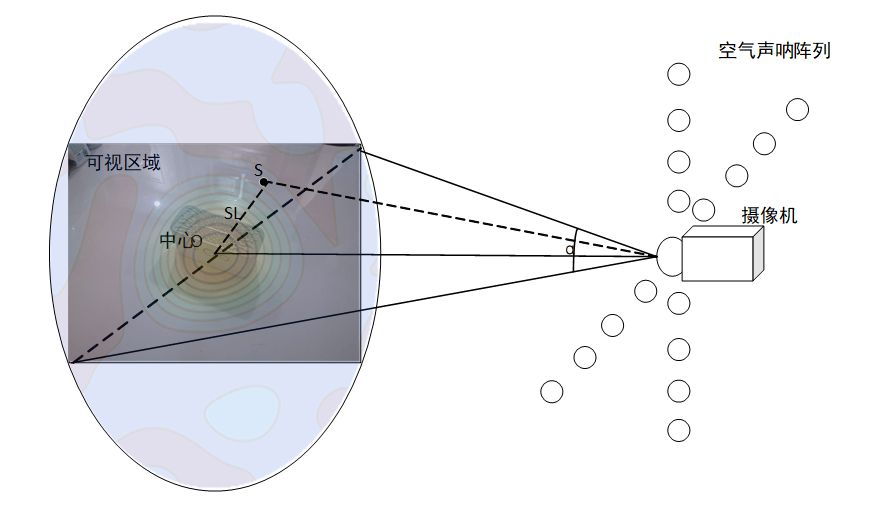
截取彩色值较高的一部分显示,那么在可视区域的成像效果就如下图:
到这里,相信大家基本了解声学相机的基本原理了,并没有那么神秘哦。
声学相机本质上不是一个新鲜的东西,早在上世纪70年代,国外就已经出现了相关的应用,但是早期设备进口成本较高,截至目前,进口的声学相机的价格仍然高达数十万元,这也进一步限制了它在各行各业的大规模应用。
近年来,随着国内技术水平的飞速发展,以及工业监测领域的应用需求,声学相机也逐渐在向着国产化的方向发展。相比国外进口产品,国产声学相机性能稳定,造价更低,也更加灵活自主。
如果对您有帮助,敬请采纳!
关注联丰迅声,跟我们一起用科技倾听世界的声音。